

- By YIKONG
- 2026-05-19 16:55:53
- Technical
Yikong Intelligent Towing AGV Drive System Design: Traction Force, Motor Torque and Acceleration Calculation
Introduction
As intelligent manufacturing and warehouse automation continue to develop rapidly, towing AGVs are becoming increasingly important in industrial logistics systems. In practical applications, whether the AGV drive system can provide sufficient traction force directly affects transportation efficiency, startup stability, and long-term operational reliability.
As a professional manufacturer focusing on AGV drive systems, AGV drive wheels, servo motors, and intelligent motion control solutions, Yikong Intelligent has accumulated extensive engineering experience in heavy load AGV applications, towing robots, warehouse logistics systems, and industrial automation equipment.
In many non-standard AGV projects, drive system selection is still based mainly on motor power or rated torque, which can easily lead to the following problems:
Motor overload during startup
Insufficient traction force causing towing failure
Slow acceleration response
Excessive structural impact during docking
Premature failure of buffer systems
Therefore, AGV drive system design should be based on classical mechanics calculations, combining traction force, rolling resistance, acceleration load, wheel torque, and buffer structures into a complete engineering calculation model.
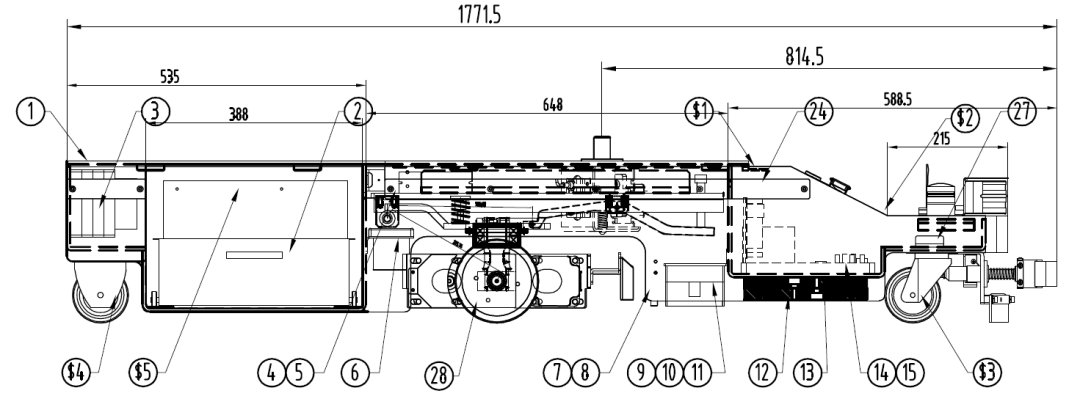
.webp)
2. AGV System Load Definition
The foundation of towing AGV power calculation is the total system mass:
M = m_AGV + m_load
Where:
m_AGV: AGV self-weight
m_load: Payload or towing cart mass
M: Total system mass
The total gravitational load is:
W = M × g
Where g = 9.8 m/s².
In practical projects, Yikong Intelligent usually recommends reserving additional load margin for heavy-duty towing AGV systems to ensure stable operation under long-term continuous working conditions.
3. Driving Resistance Analysis
During straight-line operation, AGVs mainly need to overcome rolling resistance and acceleration inertia.
3.1 Rolling Resistance
Rolling resistance is generated by wheel-ground deformation:
Ff = f × M × g
Where f is the rolling resistance coefficient, generally ranging from 0.03 to 0.06.
For warehouse AGVs operating on epoxy floors or concrete surfaces, Yikong Intelligent typically optimizes wheel material and drive wheel structure to reduce rolling resistance and improve transmission efficiency.
Under turning conditions or uneven surfaces, rolling resistance may increase by 5%–10%, so engineering safety margins must be considered during drive wheel selection.
3.2 Air Resistance
For indoor AGV systems operating at low speed:
Fw = 0.5 × rho × Cd × A × v²
This resistance is usually negligible in industrial AGV engineering calculations.
3.3 Acceleration Inertial Resistance
During startup or acceleration:
Fj = M × a
If rotational inertia from motors and reducers is included:
Fj = M × a + Σ(Ji × alpha_i / ri)
However, simplified engineering calculations generally use:
Fj ≈ M × a
3.4 Total Required Traction Force
Therefore, the total traction force required by the AGV is:
F_total = M × a + f × M × g
This equation is one of the core foundations for AGV drive wheel and servo motor selection.
4. Drive Wheel Force and Torque Relationship
The AGV drive wheel converts motor torque into actual ground traction force.
4.1 Basic Mechanical Formula
F = T / r
Where:
F: Ground traction force
T: Drive wheel output torque
r: Drive wheel radius
This explains why compact drive wheel systems with smaller wheel diameters can often achieve higher traction force under the same motor torque conditions.
Yikong Intelligent’s AGV drive wheel systems are optimized for traction efficiency, compact structure, and heavy load capacity, making them suitable for towing AGVs, differential AGVs, AMRs, and outdoor mobile robots.
4.2 Multi-Drive Wheel Systems
For systems with n drive wheels:
T_total = n × T_wheel
Considering gearbox efficiency:
T_wheel = (T_motor × i × eta) / n
Where:
i: Reduction ratio
eta: Transmission efficiency (typically 0.9–0.95)
5. Acceleration and Motor Torque Verification

A qualified AGV design must verify not only whether the vehicle can move, but also whether it can achieve the target acceleration under load conditions.
5.1 Acceleration Formula
a = (F_total - f × M × g) / M
Expanded form:
a = (n × T / r - f × M × g) / M
This formula is critical for evaluating AGV acceleration performance.
5.2 Starting Torque Requirement
The startup stage is the most demanding condition for AGV motors:
T_start = ((M × a + f × M × g) × r) / n
For heavy-duty towing AGVs, Yikong Intelligent typically recommends reserving additional startup torque margin to prevent overload under full-load conditions.
5.3 Steady-State Running Torque
During constant-speed operation:
T_steady = (f × M × g × r) / n
6. Engineering Example Analysis
Example parameters:
M = 100 kg
r = 0.015 m
f = 0.05
n = 2
Target acceleration:
a = 0.5 m/s²
6.1 Rolling Resistance
Ff = 100 × 9.8 × 0.05 = 49 N
6.2 Total Traction Force
F_total = 100 × 0.5 + 49 = 99 N
6.3 Single Wheel Torque Requirement
T = (99 × 0.015) / 2 = 0.7425 N·m
Engineering Conclusion
This example demonstrates that AGV drive system design must be based on actual acceleration targets and real load conditions rather than relying only on motor rated power.
In actual industrial projects, Yikong Intelligent often combines servo motors, planetary gear reducers, AGV drive wheels, and motor controllers into integrated drive solutions to improve overall system stability and traction performance.
7. Spring Buffer System Design
During docking or anti-collision processes, towing AGVs require spring buffer systems to absorb impact energy.
7.1 Hooke’s Law
F = k × x
Where:
k: Spring stiffness
x: Compression displacement
7.2 Multi-Spring Load Distribution
For systems using n_s springs:
F_spring = (M × g) / n_s
Spring stiffness:
k = F_spring / x
7.3 Design Principles
An effective AGV buffer system should:
Evenly distribute impact load
Maintain sufficient compression stroke
Prevent rigid impact transmission to the vehicle frame
8. Conclusion
The core of towing AGV drive system design is the balance between traction force, resistance, inertia, and structural buffering capability.
For industrial AGV applications, motor power alone cannot determine whether a drive system is suitable. Engineers must comprehensively evaluate:
Total vehicle mass
Target acceleration
Wheel radius
Gear reduction ratio
Drive wheel torque
Rolling resistance
Buffer structure design
As an AGV drive system manufacturer, Yikong Intelligent continues to provide customized drive wheel systems, servo motors, differential drive solutions, and heavy load AGV power systems for intelligent logistics and industrial automation applications worldwide.