

- By YIKONG
- 2026-06-26 09:59:14
- Technical
Outdoor AGV Navigation Technologies for Automated Ports
Introduction
Automated Guided Vehicles (AGVs) have become a key part of modern automated ports. Reliable outdoor navigation directly affects transport efficiency, safety, and operating costs. Unlike indoor factories, ports expose AGVs to rain, fog, strong sunlight, salt spray, and long travel distances, making navigation system selection especially important.
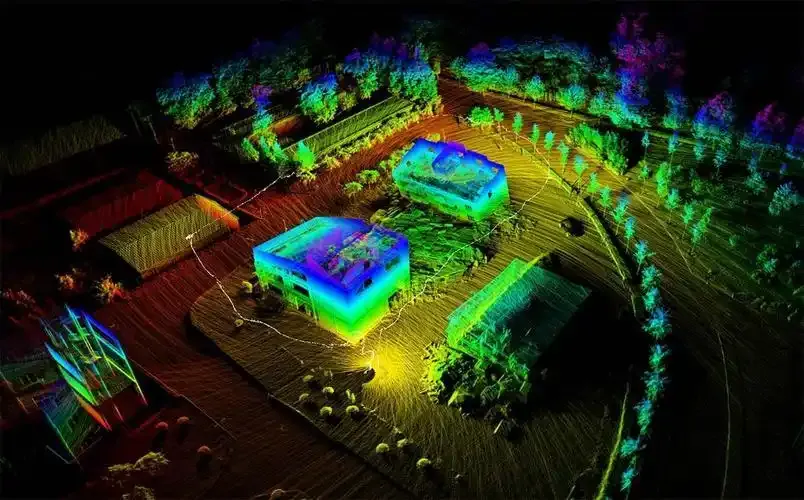
Laser Navigation
Laser navigation determines vehicle position by scanning reflective targets installed around the operating area. With positioning accuracy within 2 mm, it is one of the most mature AGV navigation technologies. It offers excellent precision and flexible route adjustment but requires many reflectors across large terminals. Heavy rain, fog, and strong sunlight may also reduce performance, increasing installation and maintenance costs.
.png)
Vision Navigation
Vision navigation combines industrial cameras with AI and SLAM algorithms to identify environmental features and calculate vehicle position. It offers centimeter-level accuracy and excellent flexibility without extensive infrastructure. However, image quality, lighting conditions, and computing power greatly influence system performance.
Millimeter-Wave Radar Navigation
Millimeter-wave radar continuously scans the environment and identifies reference landmarks. Its positioning accuracy is typically within 10 cm. Compared with laser navigation, it performs better in rain, fog, and dusty environments, although hardware costs remain relatively high.
.webp)
Differential GPS (DGPS)
DGPS improves conventional GPS by correcting satellite errors through a local reference station. Positioning accuracy can reach within 2–5 cm, making it suitable for large outdoor terminals with minimal ground infrastructure. Because satellite signals can be blocked by cranes or container stacks, DGPS is often combined with inertial navigation.
FROG Navigation
The Free Ranging On Grid (FROG) system uses RFID transponders embedded in the pavement at approximately 2-meter intervals. Each time an AGV passes a node, its position is corrected. The system achieves positioning accuracy within 3 cm and has been successfully deployed in automated container terminals such as the Port of Rotterdam.
Integrated Inertial Navigation
Modern inertial navigation combines an IMU, magnetic markers, RFID, wheel encoders, and GNSS correction. Multi-sensor fusion compensates for accumulated errors and provides positioning accuracy within 1–3 cm while requiring relatively little infrastructure, making it one of the preferred solutions for outdoor port AGVs.
Comparison
Technology | Accuracy | Infrastructure | Outdoor Use | Cost |
Laser | Within 2 mm | Medium | Good | High |
Vision | 1–5 cm | Low | Good | High |
Millimeter-wave | Within 10 cm | Medium | Excellent | High |
DGPS | 2–5 cm | Low | Good | Medium |
FROG | Within 3 cm | High | Excellent | High |
Integrated Inertial | 1–3 cm | Low | Excellent | Medium |
Why Inertial Navigation Is Becoming Popular
For automated ports, overall engineering efficiency is more important than theoretical positioning accuracy alone. Integrated inertial navigation provides an excellent balance between accuracy, deployment cost, maintenance effort, and environmental adaptability. By combining multiple sensors, it delivers reliable positioning during long-distance outdoor operation.
Drive Systems Also Matter
Navigation accuracy depends not only on sensors but also on motion control. High-resolution wheel encoders, precise steering control, and stable servo systems all contribute to accurate path tracking. Yikong Intelligent develops AGV drive wheels, steering drive units, and low-voltage servo systems that have been applied in port AGVs, autonomous tow tractors, and heavy-duty outdoor mobile robots.
Conclusion
As automated ports continue to evolve, multi-sensor fusion is becoming the mainstream navigation architecture. Laser, DGPS, FROG, and vision technologies each offer unique advantages, while integrated inertial navigation provides one of the best balances of precision, reliability, flexibility, and cost for large-scale outdoor AGV applications.